| Oddelenie senzorických informačných systémov a technológií Vedúci: Ing. Mgr. Robert Andok, PhD. Zástupca: RNDr. I. Kostič |
||
| Oddelenie senzorických informačných systémov a technológií vzniklo zlúčením Oddelenia elektrónovej litografie a Oddelenia senzorických systémov. | ||
|
Oddelenie elektrónovej litografie sa dlhodobo zaoberá výskumom v oblasti mikrotechnológií založených na využití elektrónového lúča. Výskumnou prioritou Oddelenia elektrónovej litografie ÚI SAV je výskum v oblasti metód prípravy mikrometrových a nanometrových štruktúr s využitím elektrónového lúča a ich využitie v širokom rozsahu aplikácií v oblasti materiálového výskumu a nanotechnológií. Výskumné témy: Cieľ výskumu: |
||
| Oddelenie senzorických systémov sa dlhodobo zameriava na základný a aplikovaný výskum v oblasti mechatroniky zo zameraním na senzorické systémy, spracovanie signálov, spracovanie obrazu (sledovanie objektov) a pružných poddajných štruktúr (presné polohovacie systémy, deformačné časti snímačov, mikroaktuátory). Výskumná činnosť sa zameriava na riešenie úloh v dvoch oblastiach:
Pohľad do minulosti  Zváracia hlavica robota OJ-10 s trojzložkovým taktilným snímačom V tomto období sa vyvinuli viaceré senzory a algoritmy polohového ako aj silového riadenia, ktoré sa prakticky overili v technologických procesoch zvárania a montáže. Prístupy a aplikované technické riešenia boli porovnateľné so stavom výskumu a vývoja na popredných pracoviskách v Európe. Príkladom sú ojedinelé riešenia viaczložkových taktilných a silovo-momentových snímačov a súvisiace algoritmy spracovania signálov s nadväzným riadením kinematiky robotov.<br\> Medzi ďalšie významné výsledky riešenia národných a medzinárodných projektov možno zaradiť vývoj termálneho zobrazovacieho systému na báze nechladeného pyro-elektrického detektora (1996) a riešenia nekonvenčných operačných prostriedkov robotiky, napr. pre operácie humanitárneho odmínovania v rámci medzinárodného projektu ANGEL (EUREKA) (2000 – 2005); súvisiace s vývojom odmínovacieho systému „Božena“ a „Diana“ 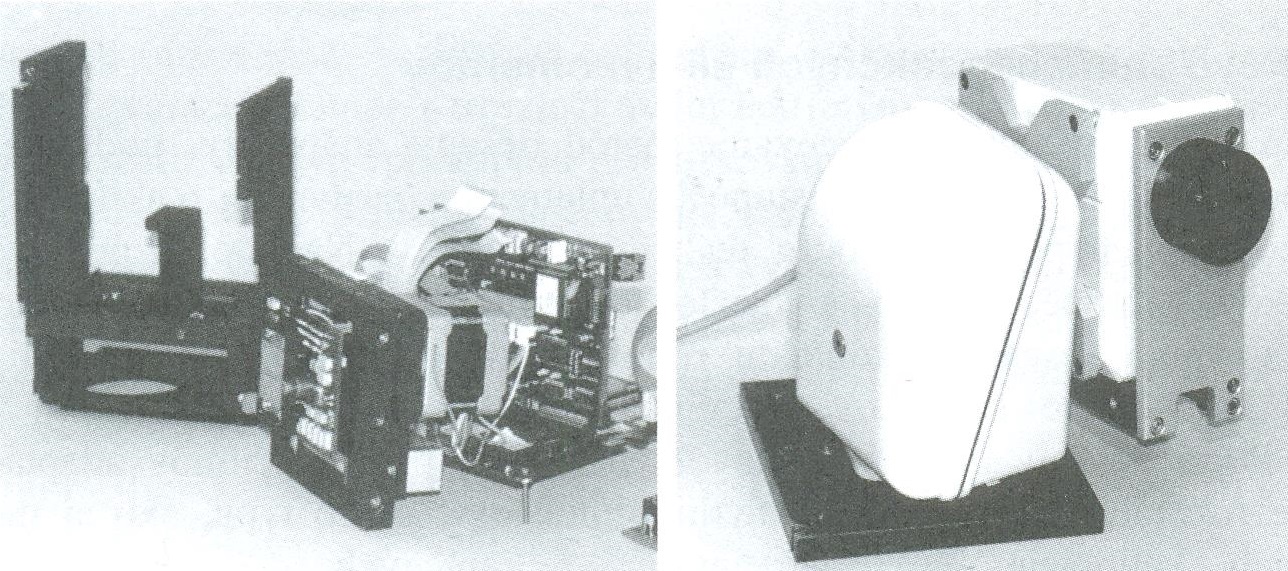 Hlavné časti a prototyp nechladenej IČ kamery s dvojosím polohovacím mechanizmom Významnou vedeckou udalosťou bolo organizovanie 23. medzinárodnej konferencie „Robotics in Alpe-Adria-Danube Region (RAAD)“ (raad2014.org) na Smolenickom zámku (3. – 5. septembra 2014) pod patronátom medzinárodných organizácií združujúcich inžinierov a vedcov IFToMM a IEEE. Bolo prezentovaných 60 príspevkov pri účasti 80 prispievateľov z 18 krajín. V súčasnosti pracovníci Oddelenia senzorických systémov pracujú vo výskumných skupinách na pracoviskách v Banskej Bystrici a Bratislave Aktivity k praxi Kontakt
|
Veda je budúcnosť: Vitajte na stránkach Ústavu informatiky Slovenskej akadémie vied, Bratislava