| Applications of the Sensor systems department |
| Welding Robot OJ-10 | |||
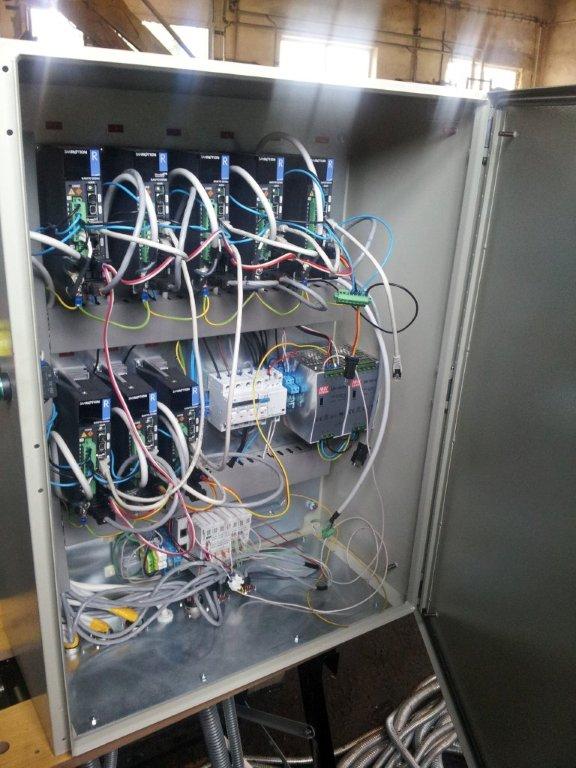 Fig. 1. Control box for robot OJ-10  Fig. 2. OJ-10 arm with new servomotors |
During 1980-th the Institute developed some parts of robot control systems for welding robot workcells OJ-10. Many of them are still in use today. The users have requested new workcells and upgrade of existing ones. Rapčan Servis Detva, the firm servicing the workcells, asked the Czech firm MEFI, s.r.o to develop a new control box. The new, modern, EtherCAT based control box for OJ-10 workcells is available (Fig. 1). New servodrives are installed on robot effectors (Fig. 2). The members of Department of Sensor Systems are developing control software for OJ-10 with the new control box and servomotors. Relevant publications:
Contact persons: |
||
| Experimental platform for tests of compliant structures | |||
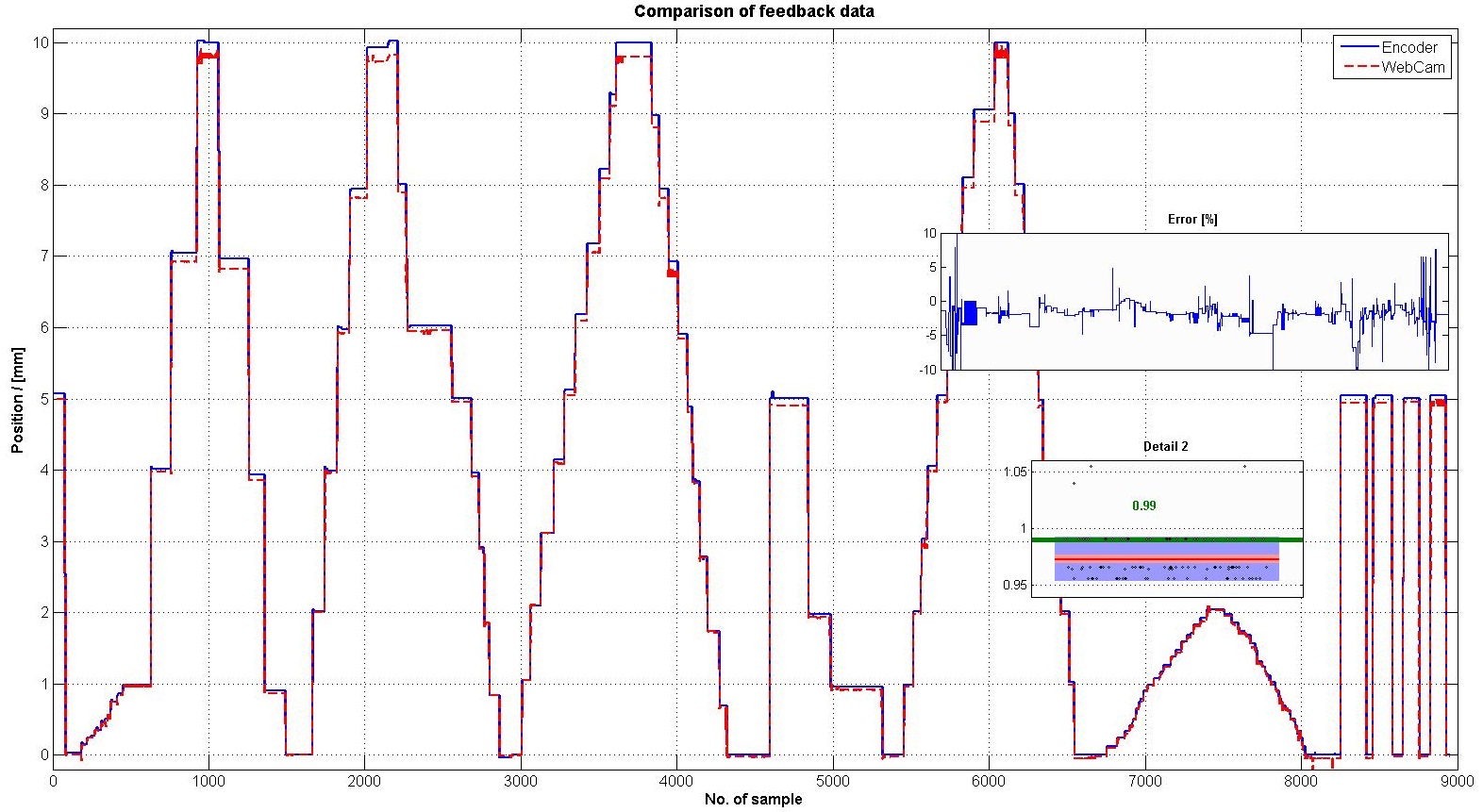
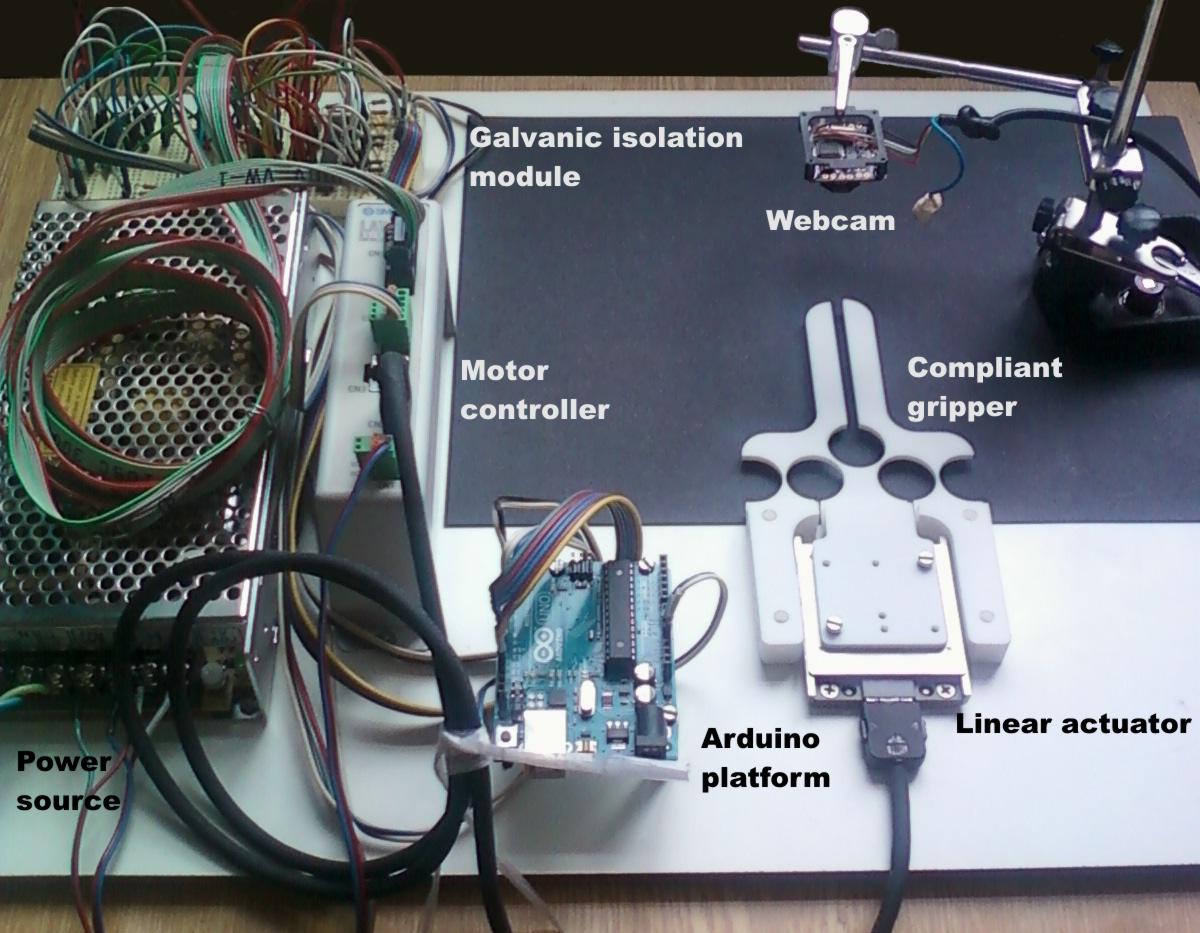 Experimental platform for tests of compliant structures The purpose of this test bed is for verification of performance characteristics of various compliant devices frequently used in robotics (e.g. mechanisms, grippers and mechanical amplifiers). It enables to apply HIL and SIL approached as suitable tools in design of complex mechatronic devices. For performing first experiments mutual interconnection between actuators and control system worksunder MATLAB environment what allows to make experiments with standard industrial actuators. As position feedback are used two approaches – encoder included in linear actuator and image processing of data from webcam. Small disadvantage of actual realization are relatively low working frequencies, the system can work.
The platform enables performing tests and verification of control algorithms (control of actuator, sensing positions and image processing). Finally, any compliant robotic device can be designed to satisfy desired features in an optimal way. Relevant publications:
Contact persons: |
|||
| Flexural bodies for force/displacement sensors | |||
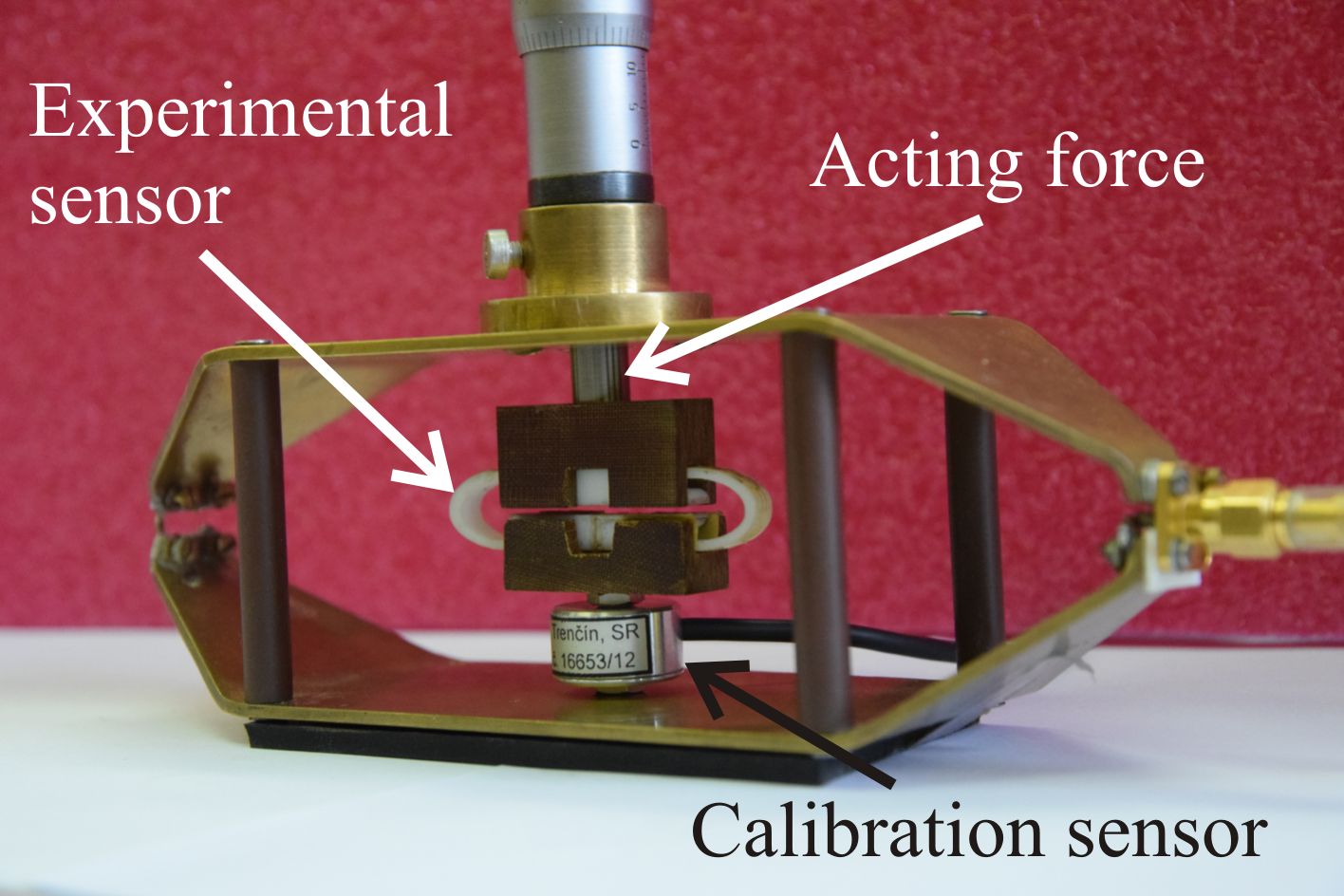
The design of the flexural bodies for one and two axis force/displacement sensors were developed. Wireless transmission with information about the sensed quantity is utilized. Consequently that, some specific design requirements should be taken into account e.q. Material of whole structure, the output – flexural characteristics, etc. Contact persons:  Deformation of xy-force/displacement sensor  Deformation and stress of one axis sensor |
|||